A Chapter Lead's blog
A Chapter Lead's blog
Follow
Follow
home
badges
newsletter
How I changed a team meeting ritual so that I can grow
Leaders evolve alongside their team's growth.
Mihnea Simian
3 min read
Leading Remote: Managing instant messaging interruptions
Mihnea Simian
5 min read
Rapidly boost code review efficiency for sizeable distributed teams
Mihnea Simian
5 min read
Revojs: How a Local Conference in 🇷🇴 Romania turned into a Networking Gold Mine
Mihnea Simian
8 min read
Hyrum's law in modern frontend
Mihnea Simian
5 min read
What are some obscure technologies you once learnt and don't expect to use them again
Mihnea Simian
2 min read
Your last read before your next great idea of an app using OpenAI APIs
Mihnea Simian
4 min read
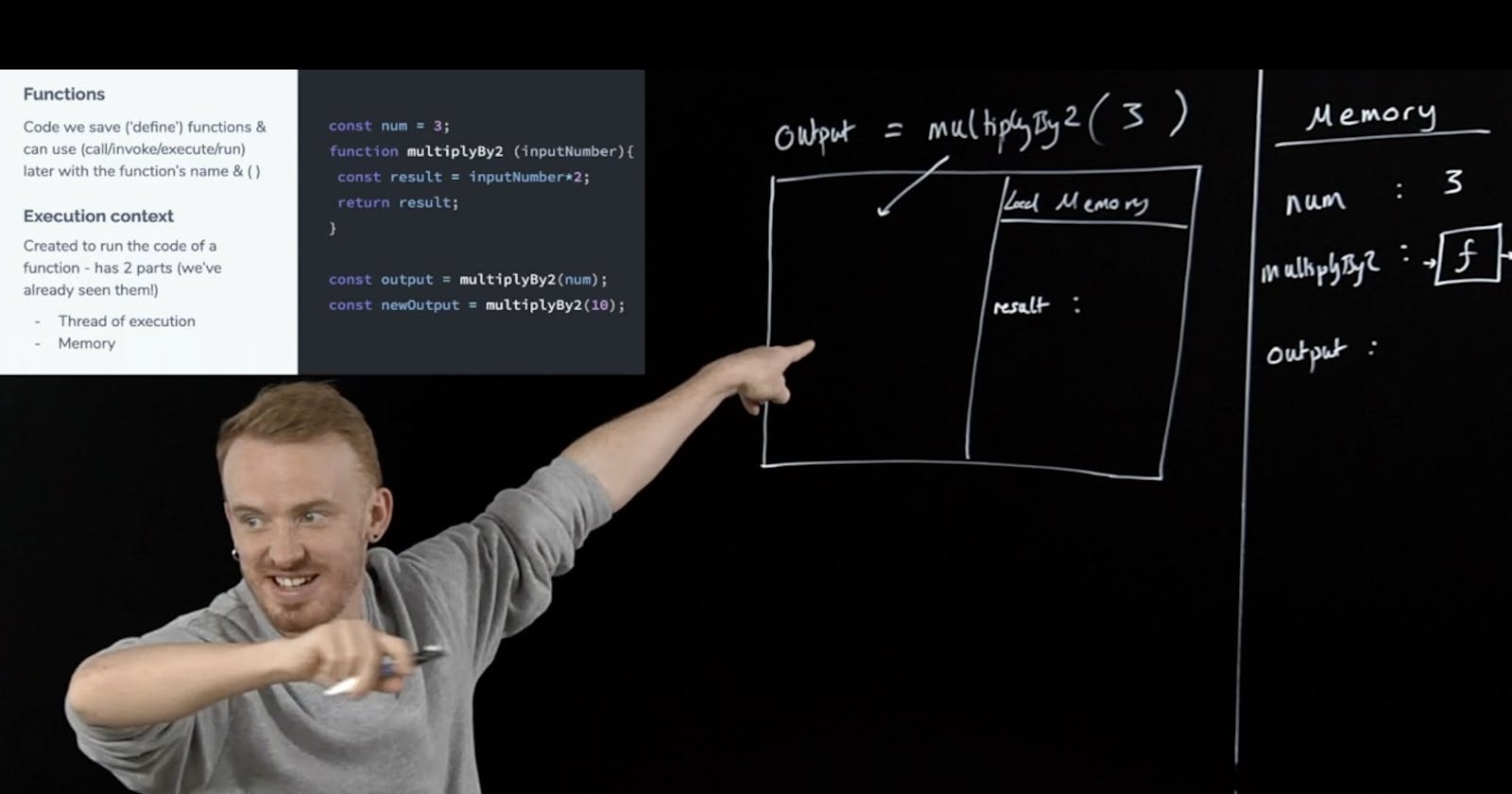
Cracked: Why Will's JavaScript The Hard Parts class is so efficient
Mihnea Simian
5 min read
I've led a Frontend Chapter for three years and this is the idea I'm most proud of
Mihnea Simian
4 min read
Accessibility 101
Mihnea Simian
6 min read
How my Frontend skills helped me pass a sailing exam
Mihnea Simian
4 min read